The Aaron D. Wyner Distinguished Service Award honors an individual who has shown outstanding leadership in, and provided long-standing, exceptional service to, the Information Theory community. NYU WIRELESS’s Elza Erkip was announced as the recipient during the ISIT 2026 Award Ceremony. Elza Erkip is an Institute Professor in the Electrical and Computer Engineering Department at New York University Tandon …
Theodore (Ted) S. Rappaport, the David Lee/Ernst Weber Professor of Electrical and Computer Engineering at the NYU Tandon School of Engineering and founding director of NYU WIRELESS, has been elected to the American Academy of Arts and Sciences, one of the country’s oldest and most distinguished honorary societies. Rappaport is being recognized for a body …
The website Wirelessnerd.org is ready. In order to access the 3gpp portion of the site, you will receive a one-time code that will go to your corporate email account. Here are some examples of 3gpp questions you can ask: * What is the radar cross section (RCS) modeling equation in recent 3GPP documents? * What …
The fourth NYU WIRELESS Workshop was held on January 20-21, 2026 on the Brooklyn campus. The object of the two-day event was to bring together the foremost wireless researchers for a free exchange of ideas. The theme of the Workshop was “Twenty Years of Massive MIMO: What’s Next?” The Workshop was organized in sessions around …
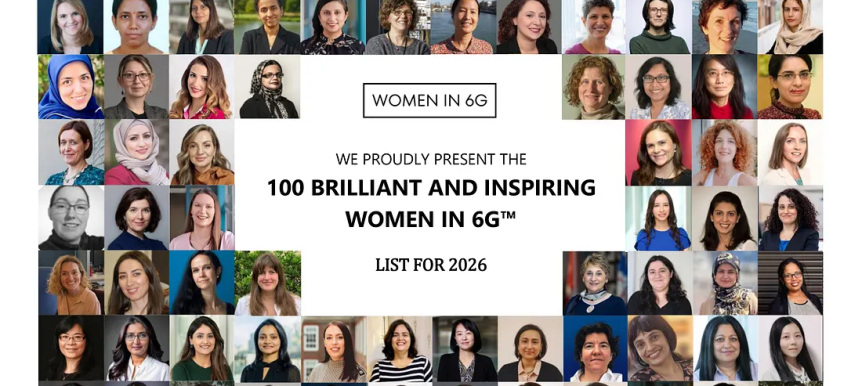
NYU WIRELESS professors Elza Erkip and Marwa Chafii were honored by the Women in 6G group as part of the “100 Brilliant and Inspiring Women in 6G™”. The goal of the group is to close the gender gap and increase diversity in the telecommunications field. The group provides support, education, and inspiration to women who are interested in entering the 6G …
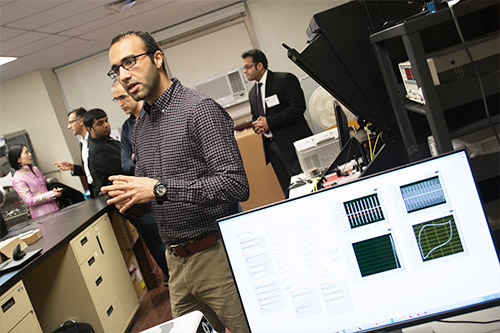
Industrial Affiliates joined us on Friday, January 30 for our annual NYU WIRELESS Open House. They learned about the latest updates from NYU WIRELESS, participated in guided lab tours, and viewed research posters and live demos presented by our many talented students.
 Theodore Rappaport Elected to American Academy of Arts and Sciences
Theodore Rappaport Elected to American Academy of Arts and Sciences